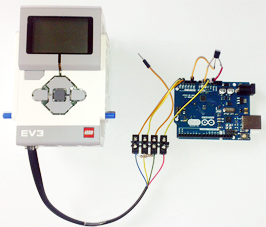
Im Unterschied zum EV3 besitzt das bekannte Arduino-Microcontroller-System ein klassisches I/O-System mit digitalen Ein- und Ausgngsports und analogen Eingängen (Analog-Digital-Wandler). Damit lässt sich eine Vielzahl von billigen Sensoren und Aktoren betreiben und es ist leicht, selbstgebaute elektronische Schaltungen anzuschliessen. Diese Vorteile gegenüber dem EV3 kann man so nutzen, dass man beide Geräte zusammenschliesst und die Sensoren und Aktoren des Arduino mit dem EV3 anspricht.
Die Verbindung der beiden Geräte erfolgt am einfachsten über einen I2C-Link, da beide Geräte über eine I2C-Schnittstelle verfügen. Dabei ist der EV3 ein I2C-Masters und der Arduino ein I2C-Slave.