 |
TigerJython | xx für Gymnasien |
Forum
Remote- und autonomer- und Simulatiosmodus
Mit TigerJython können Pi2Go-Roboter im Remote- und autonomen-Modus programmiert werden. Im Remote-Modus wird der Roboter remote mit einem Python-Programm gesteuert, das auf dem Computer läuft. Im autonomen Modus wird das Programm auf einem externen Computer entwickelt, der Pythoncode auf den Robotern heruntergeladen und mit dem Python-Interpreter des Raspberry Pi ausgeführt. Die Kommunikation zwischen dem Computer und Roboter erfolgt über WLAN. Der Vorteil des autonomen Modus besteht darin, dass das zuletzt heruntergeladene Programm nachfolgend ohne den Entwicklungscomputer beliebig oft (autonom) ausgeführt werden kann. Fast alle Programme können auch im Simulationsmodus ausgeführt werden.
Pi2Go mit der Taste bedienen
Da der Pi2Go Roboter nur eine einzige Taste hat, ist dieser vielseitig belegt. Hier die wichtigsen Bedienungsschritte:
Starten Sie den den Roboter. Warten Sie bis die grünen LEDs leuchten und die IP-Adresse angezeigt wird. Danach erscheint auf dem Digitaldisplay P1-3. P steht für "Programm" und 1-3 sagt, dass man im Augenblick das 1. Programm von insgesamt 3 Programmen, die gespeichert sind, ausgewählt hat. Mit einem Klick der Taste wird das Programm gestartet.
Mit einem Doppelklick wird das nächste Programm ausgewählt. Auf der Anzeige erscheint jetzt P2-3 und mit einem Klick wird das zweite Programm gestartet. Auf dem Brick können maximal 9 Programme gespeichert werden. Wenn Sie eine Hand den vorderen Infrarot Sensor halten und Doppelklicken, werden alle gespeicherten Programme gelöscht.
Im Folgenden wird die Ausführung eines einfachen Programms im remote-, autonomen und Simulationsmodus kurz beschrieben. Beachten Sie auch den Hinweis unter D. Roboter abschalten.
A. Remote-Modus
Voraussetzungen:
- Der Roboter verfügt über einen USB-WLAN-Adapter und installierte SD-Karte
- Die WLAN-Verbindung zwischen dem Computer und Roboter über einen Router oder WLAN-Hotspot ist eingerichtet. Mehr zur WLAN-Kommunikation findet man hier.
- Auf dem Computer ist TigerJython installiert
Vorgehen:
- Starten Sie den den Roboter. Warten Sie bis auf dem Display P1-3. Der Roboter ist bereit für den Betrieb im autonomen Modus.
- Um den Roboter im Remote-Modus zu programmieren, muss ein sogenannte Brickgate-Server gestartet werden. Der BrickGate-Server empfängt Befehle, die von Ihrem Computer gesendete werden und setzt Sie in Steuerbefehle des Roboters um.
Starten Sie das dem BrickGate-Server mit einem langen Drücken der Taste . Warten Sie bis auf der Anzeige Hold erscheint. Den BrickGate-Server können Sie während der ganzen Arbeit im Remote-Modus laufen lassen.
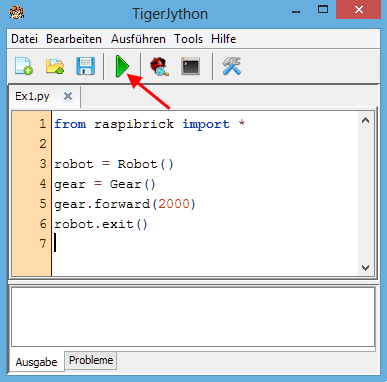 |
Starten Sie die TigerJython IDE und geben Sie ein Programm ein: from raspibrick import * robot = Robot() gear = Gear() gear.forward(1000) robot.exit() Klicken Sie auf den grünen Pfeil Ausführen. |
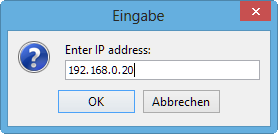
Sie können die IP-Adresse auch im Programm eingeben:
|
 |
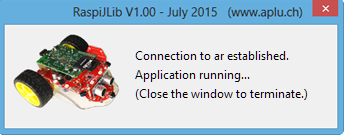
Währen der Programmausführung erscheint auf dem Computerbildschirm das nebenstehende Fenster. Dieses wird automatisch geschlossen, wenn das Programm beendet ist. Mit Schliessen dieses Fensters kann ein laufendes Programm jederzeit beendet werden. Den BrickGate-Server beenden Sie mit einem langen Drücken der Taste. |
 |
B. Autonomer-Modus
Voraussetzungen:
- Der Roboter verfügt über einen USB-WLAN-Adapter und eine installierte SD-Karte
- Die WLAN-Verbindung zwischen dem Computer und Roboter über einen Router oder WLAN-Hotspot ist eingerichtet.
Mehr zur WLAN-Kommunikation findet man hier. - Auf dem Computer ist TigerJython installiert
Vorgehen:
- Falls Sie den BrickGate-Server für den remote-Modus gestartet haben, beenden Sie ihn mit einem langen Drücken der Taste. Auf dem Display erscheint P1-3. Der Roboter ist jetzt bereit für den autonomen Modus.
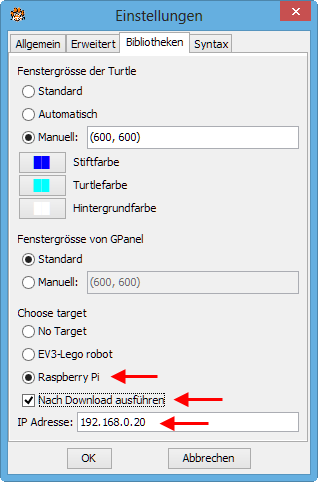
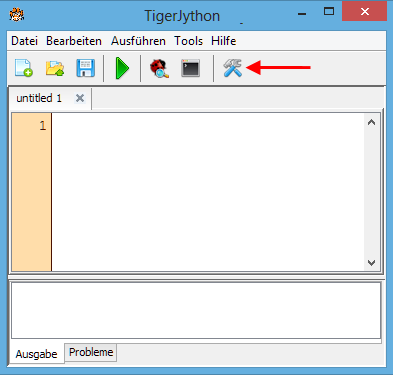
- Klicken Sie im TigerJython auf das Symbol Einstellungen und wählen Sie das Register Bibliotheken
- Wählen Sie unter Roboter auswählen die Option Raspberry Pi Roboter
|
 |
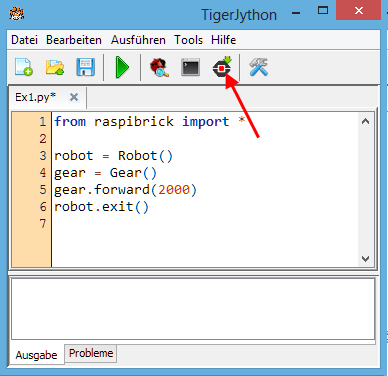 |
In der Funktionsleiste des TJ-Editors erscheint eine neue Ikone, die für die Robotik verwendet wird. Diese bleibt in den Einstellungen gespeichert und erscheint automatisch beim nächsten Start von TigerJython. Mit Klick auf diese neue Schaltfläche wird das Programm auf den Roboter heruntergeladen. . Das zuletzt heruntergeladene Programm kann mit einem kurzen Klick auf die Taste beliebig oft gestartet werden. Auf der SD-Karte können maximal 9 Programme gespeichert werden. Danach wird das älteste Programm durch das neue ersetzt. .
|
Programmdownload über Bluetooth
Unter Windows können autonome Programme auch via Bluetooth auf den Roboter herunter geladen werden. Eine Anleitung dazu finden Sie hier.
C. Simulationsmodus
Voraussetzungen:
- Auf dem Computer ist TigerJython installiert. Das Modul Rapisim und die Bilder, die für die Simulation verwendet werden sind im tigerjython2.jar enthalten.
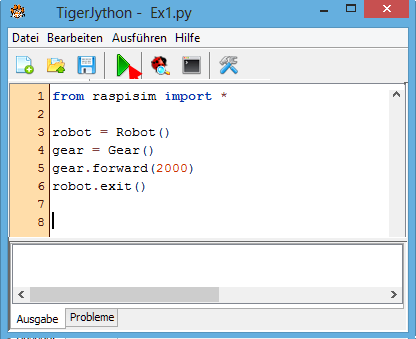 |
Geben Sie ein Programm ein. Die Programme für den Real- und Simulationsmodus unterscheiden sich nur in der Importzeile. from raspisim import * robot = Robot() gear = Gear() gear.forward(2000) robot.exit() Klicken Sie auf den grünen Pfeil Ausführen. Die Roboterbewegung wird in einem Grafik-Fenster angezeigt. |
D. Roboter abschalten
Der Roboter wird mit dem Kippschalter eingeschaltet und kann im Prinzip auf die gleiche Art abgeschaltet werden. Dadurch wird auch das Betriebssystem auf dem Raspberry Pi "abgewürgt"", was in seltenen Fällen zu einer Beschädigung der SD-Karte führen kann. Wir empfehlen deshalb, das Betriebssystem herunterzufahren. Dabei gehen Sie wir folgt vor:
|
 |