|
TigerJython | xx für Gymnasien |
Forum
Richtung ändern
Die Bewegungsrichtung des Roboters lässt sich am einfachsten mit den Befehlen aus der Klasse Gear ändern:
| left(ms) | dreht während der angegeben Anzahl Millisekunden nach links (am Ort) | |
| right(ms) | dreht während der angegeben Anzahl Millisekunden nach rechts (am Ort) | |
| leftArc(r, ms) | bewegt sich ms Millisekunden auf einem linken Kreisbogen mit dem Radius r | |
| rightArc(r, ms) | bewegt sich ms Millisekunden auf einem rechten Kreisbogen mit dem Radius r |
Alle diese Funktionen kann man auch als nichtblockierende Funktionen left(), right(), leftArc(r) und rightArc(r) verwenden.
Beispiel 1: Rechtwinklig abbiegen Der Roboter bewegt sich eine kurze Strecke vorwärts, dreht 90° nach links und bewegt sich eine kurze Strecke weiter in der neuen Richtung.
|
 |
Erklärungen zum Programmcode:
| gear.left(770): Dreht während 770 Millisekunden nach links, was etwa einem rechten Winkel entspricht. Der Drehwinkel ist aber auch vom der Unterlage und dem Zustand der Batterien abhängig und muss eventuell angepasst werden |
Beispiel 2: Auf Kreisbogen fahren Der Roboter bewegt sich zuerst 3000 ms auf einem Rechtsbogen und dann 3000 ms auf einem Linksbogen.
|
 |
Erklärungen zum Programmcode:
| gear.setSpeed(60): setzt die Geschwindigkeit auf 60 (Werte zwischen 0 und 100) | |
| gear.rightArc(0.15, 3000): Roboter bewegt sich während 3000 Millisekunden auf einem Rechtsbogen mit dem ungefähren Radius 0.15 Meter |
| Aufgaben Serie 2: |
1) |
Der Roboter soll einen Gegenstand umfahren und dann die Fahrt in der ursprünglichen Richtung fortsetzen. |
2) |
Der Roboter soll einen Gegenstand auf einem Kreisbogen umfahren und dann die Fahrt in der ursprünglichen Richtung fortsetzen. |
 |
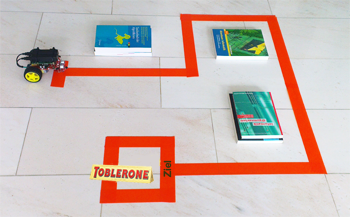
3) |
Stelle mit mehreren Gegenständen ein Parcours auf und steuere den Roboter vom Start zum Ziel.
|
|