3)
|
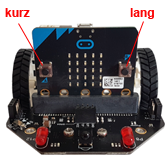
Der Morsecode wird zur Übermittlung von Nachrichten verwendet. Buchstaben, Satzzeichen und Zahlen sind als kurzes Signal, langes Signal und Pause codiert. Mit dem eingebauten Lautsprecher kannst du sehr einfach Morse-Nachrichten erzeugen.
| a) |
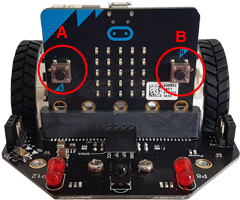
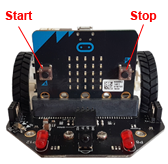
Sende einige mit Hilfe der beiden Buttons wie in der Aufgaben 2 einige kurze Nachrichten.
Codierung der einzelnen Buchstaben:
a : .- , b : -... , c : -.-. , d : -.. , e : . ,
f : ..-. , g : --. , h : .... , i : .. , j : .--- ,
k : -.- , l : .-.. , m : -- , n : -. , o : --- ,
p : .--. , q : --.- , r : .-. , s : ... , t : - ,
u : ..- , v : ...- , w : .-- , x : -..- , y : -.-- ,
z : --..
|
b) |
Mit dem folgendem Programm kannst du automatisch Morse-Nachrichten erzeugen. Es ist zweckmässig, die Codierung in einem Python-Dictionary abzulegen. Die Nachricht wird in transmit() mit einer for c in text-Schleifedurchgelaufen, und jedes Zeichen mit dot und dash abgespielt. Sende Mitteilungen in Morse-Code mit verschiedenen Geschwindigkeiten und versuche sie zu entziffern.
# Morse.py
from microbit import *
from music import *
dt = 100
freq = 1000
morse = {
'a':'.-' , 'b':'-...' , 'c':'-.-.' , 'd':'-..' , 'e':'.' ,
'f':'..-.' , 'g':'--.' , 'h':'....' , 'i':'..' , 'j':'.---' ,
'k':'-.-' , 'l':'.-..' , 'm':'--' , 'n':'-.' , 'o':'---' ,
'p':'.--.' , 'q':'--.-' , 'r':'.-.' , 's':'...' , 't':'-' ,
'u':'..-' , 'v':'...-' , 'w':'.--' , 'x':'-..-' , 'y':'-.--' ,
'z':'--..' , '1':'.----', '2':'..---', '3':'...--', '4':'....-',
'5':'.....', '6':'-....', '7':'--...', '8':'---..', '9':'----.',
'0':'-----', '-':'-....-', '?':'..--..', ',':'--..--', ':':'---...',
'=':'-...-'}
def dot():
pitch(freq, dt)
delay(dt)
def dash():
pitch(freq, 3 * dt)
delay(dt)
def transmit(text):
for c in text:
if c == " ":
delay(4 * dt)
else:
c = c.lower()
if c in morse:
k = morse[c]
for x in k:
if x == '.':
dot()
else:
dash()
delay(2 * dt)
transmit("I will be there tonight")
|
|