1. Einrichtung
A) Maqueen (mbRobot)

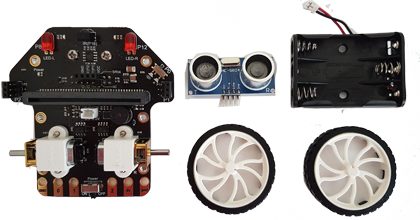
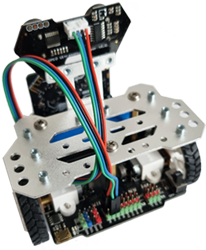
Der Micro:Maqueen Bausatz enthält eine 8 x 8.5 cm grosse Platine, in der bereits folgende Komponenten eingebaut sind:
- 2 Infrarot Line Tracker
- Buzzer
- 2 rote LEDs
- Fahrwerk mit 2 Motoren
- 1 Ultraschall- und 2 Infrarotsensoren
- I 2C Schnittstelle
- 2 dreipolige Stecker/Buchsen für GPIO P1/P2
- dreipoliger Stecker für Servomotoren S1
- Steckleiste für den micro:bit
- ON-/OFF Schalter
|
|
 |
 |
|
Zusätzlich muss man einen micro:bit V2 und drei AAA (1.5 V) Batterien beschaffen. Bei den aufladbaren Batterien sollte man unbedingt Nickel-Zink-Batterien wählen, da nur diese 1.5 V abgeben.
|
|
|
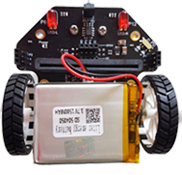
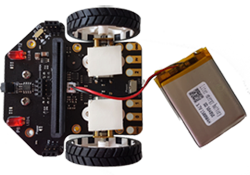
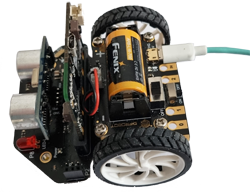
Wir empfehlen, anstelle der drei AAA Baterien, eine Lipo-Akku-Batterie (3.7 V, 1.5 Ah) zu beschaffen und diese an den Motoren mit einem doppelseitigen Klebband zu befestigen.
Die flache Lipo-Batterie ist insbesondere dann vorteilhaft, wenn man den Roboter später für die Verwendung von IoT mit einem ESP 32 Coprozessor ergänzen will.
|
|
 |
|
|
 |
|
Erhältlich sind auch runde CR123A Li-ion Akku-Batterien, die direkt mit einem USB-Kabel aufgeladen werden können.
|
Firmware auf dem micro:bit installieren
Die Programme werden mit TigerJython entwickelt, via USB-Kabel auf den micro:bit des Roboter hinunterladen und dort mit MicroPython (einer reduzierten Python-Version) ausgeführt. Dazu muss auf dem micro:bit eine entsprechende Firmware installiert sein. Gehen Sie wie folgt vor:
Schliessen Sie den micro:bit über ein USB-Kabel am Computer an. Im Gerätemanager siehst man ein zusätzliches externes USB-Gerät.
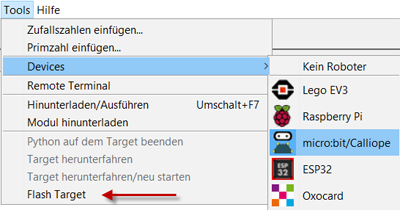
Starten Sie TigerJython und wählen Sie unter Tools/Devices microbit/Calliope aus. Klicken Sie unter Tools auf Flash Target. Warten Sie bis der Kopiervorgang abgeschlossen ist und die Meldung All done erscheint.
|
|
 |
Falls Sie einen Maqueen Roboter mit micro:bit V1 haben, müssen Sie eine reduzierte Version des Moduls mbrobot verwenden
mehr...
Motoren testen
Starten Sie TigerJython und geben Sie folgendes Testprogramm ein oder klicken Sie auf "in Zwischenablage kopieren" und fügen Sie es mit Ctrl + v im Editorfenster ein.
Testprogramm:
from mbrobot import *
forward()
delay(2000)
stop()
 |
|
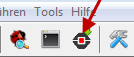
Mit Klick auf die Schaltfläche Programm downloaden wird das Programm gestartet. |
Der Roboter fährt 2 Sekunden vorwärts.
|
|

Mit dem kleinen Schalter hinten auf dem Maqueen-Board wird die Stromversorgung aller Board-Komponenten eingeschaltet. Es ist oft vorteilhaft, diesen Schalter erst nach dem Programmdownload einzuschalten, vor allem dann, wenn sich der Roboter frei bewegen soll. |
| Auf der Rückseite des micro:bits befindet sich ein Reset-Button. Mit Klick auf diesen Button kann das zuletzt heruntergeladene Programm jederzeit erneut ausgeführt werden. |
|
 |
Motoren kalibrieren
Falls der Roboter nicht geradeaus fährt, können Sie die Motoren kalibrieren.
Ultraschalsensor testen
Testprogramm
from mbrobot import *
repeat:
d = getDistance()
print(d)
delay(200)
|
|
Die vom Ultraschallsensor gemessene Distanz wird im Terminalfenster angezeigt. Bewegen Sie Ihre Hand oder einen Gegenstand vor dem Roboter. Wenn die Zahlen im Terminalfenster etwa der Distanz in Centimetern entsprechen, funktioniert der Ultraschallsensor einwandfrei. |
B) Maqueen Plus (mbRobot_plus)
 |
|
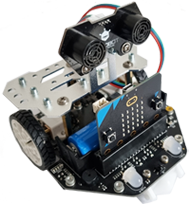
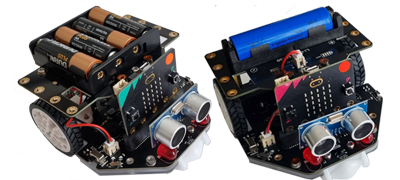
Der mbRobot Plus kann nach der beiliegenden Anleitung zusammengebaut werden. Zusätzlich muss ein micro:bit V2 und eine aufladbare Akku-Batterie (Li-Ion, 18650, 3.7 V, 2300 mAh) beschafft werden.
Da die Hardware von mbRobot und mbRobot Plus unterschiedlich ist, braucht man eine zusätzliche Befehlsbibliothek. Das Modul mbrobot wird beim Flashen automatisch auf den micro:bit kopiert. Das Modul mbrobot_plus muss zusätzlich installiert werden.
Sie können das Modul hier herunterladen:
Download mbrobot_plus.zip. |
- Packen Sie die heruntergeladenen Datei mbrobot_plus.zip aus -> mbrobot_plus.py.
- Starten Sie TigerJython und schliessen Sie den micro:bit des mbRobots mit dem USB-Kabel am Computer an
- Überprüfen Sie unter "Einstellungen /Bibliotheken" die Roboterwahl "micro:bit/Calliope"
- Falls der micro:bit noch nicht geflasht ist, wählen Sie "Tools/Flash Target"
- Öffnen Sie die Datei mbrobot_plus.py im TigerJython-Editor
- Wählen Sie "Tools/Modul hinunterladen"
- Testen Sie die Installation mit dem folgenden Programm:
from mbrobot_plus import *
forward()
delay(2000)
stop()
|
Ultraschalsensor testen
|
|
Verbinden Sie den Ultraschallsensor mit dem mitgelieferten Kabel mit dem Maqueen Pluss - Board. Stecken Sie das rote Kabel auf 3V3 Pin, das schwarze auf GND, das blaue auf P2 und das grüne auf P1. Testprogramm:
from mbrobot_plus import *
repeat:
d = getDistance()
print(d)
delay(200)
|
| Die vom Ultraschallsensor gemessene Distanz wird im Terminalfenster angezeigt. Bewegen Sie Ihre Hand oder einen Gegenstand vor dem Roboter. Wenn die Zahlen im Terminalfenster etwa der Distanz in Centimeter entsprechen, funktioniert der Ultraschallsensor einwandfrei. |
C) Maqueen Plus V2 (mbRobot_plusV2)
 |
|
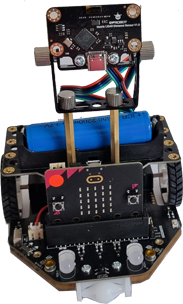
Der Maqueen PlusV2 wird praktisch fertig zusammengebaut geliefert. Er ist in zwei Varianten erhältlich:
- mit einer Befestigung für vier AA Batterien
- mit einer Befestigung für eine aufladbare Akku-Batterie (Li-ion 18650)
Batterien und micro:bit V2 muss man zusätzlich beschaffen .
|
Da die Hardware von mbRobot und mbRobot PlusV2 unterschiedlich ist, braucht man eine zusätzliche Bibliothek. Das Modul mbrobot wird beim Flashen automatisch auf den micro:bit kopiert. Das Modul mbrobot_plusV2 muss zusätzlich auf den micro:bit herunterladen werden.
Sie können das Modul hier herunterladen: Download mbrobot_plusV2.zip. |
- Packen Sie die heruntergeladenen Datei mbrobot_plusV2.zip aus -> mbrobot_plusV2.py.
- Starten Sie TigerJython und schliessen Sie den micro:bit des Roboters mit dem USB-Kabel am Computer an
- Überprüfen Sie unter "Einstellungen /Bibliotheken" die Roboterwahl "micro:bit/Calliope"
- Falls der micro:bit noch nicht geflasht ist, wählen Sie "Tools/Flash Target"
- Öffnen Sie die Datei mbrobot_plusV2.py im TigerJython-Editor
- Wählen Sie "Tools/Modul hinunterladen"
- Testen Sie die Installation mit dem folgenden Programm:
from mbrobot_plusV2 import *
forward()
delay(2000)
stop()
Laden Sie das Programm via USB Kabel auf den micro:bit und stellen Sie den Schalter rechts auf dem Chassis auf ON. Der Roboter bewegt sich während 2000 Millisekunden vorwärts.
Falls der Roboter nicht geradeaus fährt, können Sie die Motoren kalibrieren.
|
D) Maqueen Plus V3 (mbRobot_plusV3)
 |
|
Der mbRobot Plus kann nach der beiliegenden Anleitung zusammengebaut werden. Zusätzlich muss ein micro:bit V2 und eine aufladbare Akku-Batterie (Li-Ion, 18650, 3.7 V, 2300 mAh) beschafft werden.
Da die Hardware unterschiedlich ist, braucht man eine zusätzliche Bibliothek. Das Modul mbrobot_plusV3 muss zusätzlich auf den micro:bit herunterladen werden.
Sie können das Modul hier herunterladen: Download mbrobot_plusV3.zip.
- Packen Sie die heruntergeladenen Datei -> mbrobot_plusV2.py.
- Starten Sie TigerJython und schliessen Sie den micro:bit des Roboters mit dem USB-Kabel an
- Falls der micro:bit noch nicht geflasht ist, wählen Sie "Tools/Flash Target"
- Öffnen Sie die Datei mbrobot_plusV3.py im TigerJython-Editor
- Wählen Sie "Tools/Modul hinunterladen"
|
- Testen Sie die Installation mit dem folgenden Programm:
from mbrobot_plusV3 import *
forward()
delay(2000)
stop()
Laden Sie das Programm via USB Kabel auf den micro:bit und stellen Sie den Schalter rechts auf dem Chassis auf ON. Der Roboter bewegt sich während 2000 Millisekunden vorwärts.
|
Roboter-Simulation
Die meisten Programme können auch mit einem virtuellen Roboter (im Simulationsmodus) ausgeführt werden. Die Roboterbewegungen werden dabei in einem Grafikfenster dargestellt. Auch Light- , Ultrasonic-Sensoren und LEDs können simuliert werden. Die Programme für den realen und den virtuellen Roboter sind praktisch gleich.
Um ein Programm im Simulationsmodus auszuführen, klicken Sie den grünen Startbutton.
Der Roboter im Grafikfenster bewegt sich eine kurze Strecke vorwärts. |
|
Testprogramm
from mbrobot import *
#from mbrobot_plusV2 import *
forward()
delay(2000)
stop()
|
Falls Sie mit Maqueen Plus V3 arbeiten, verwenden Sie die Import-Zeile
from mbrobot_plusV3 import * |