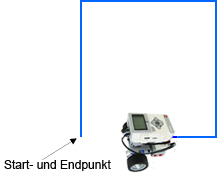
Beispiel 3: Endlose while-Schleife
Die sogenannte "endlose while-Schleife" wird in der Robotik sehr häufig verwendet, zum Beispiel, wenn man über längere Zeit Sensorwerte registrieren will. Man muss aber jederzeit, das laufende Programm abbrechen können, ohne dden Roboter ausschalten zu müssen. Es ist daher nicht sinnvoll, eine unabbrechbare while-Schleife mit while True zu verwenden.
Die Schleife while not isEscapeHit() läuft so lange, bis Escape gedrückt wird. Im Remote-Modus handelt es sich um die Tastaturtaste Esc, im autonomen Modus ist es die Drucktaste.
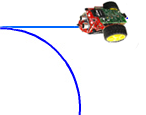
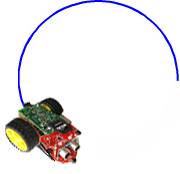
In diesem Beispiel bewegt sich der Roboter auf einem Linksbogen so lange, bis das Programm mir Escape beendet wird.
# Repeat3.py
from raspisim import *
# from raspibrick import *
robot = Robot()
gear = Gear()
gear.setSpeed(70)
while not isEscapeHit():
gear.leftArc(0.1)
robot.exit()
|
| Programmcode markieren
(Ctrl+C kopieren) |
|
|
 |

Escape Remote-Modus
|

Escape autonomer-Modus
|
|