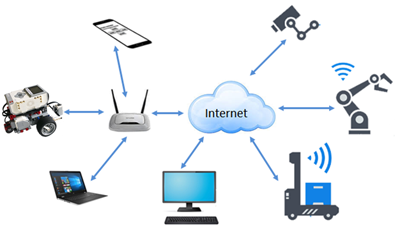
Das IoT ist eines der aktuellsten Themen der heutigen Informatik. Durch Einbau von kleinen, billigen aber WLAN-fähigen Microcontrollern können Geräte und Systeme (kurz Dinge) über ein Netzwerk Daten und Informationen untereinander und mit übergeordneten Systemen kommunizieren. Im Zusammenhang mit IoT spricht man häufig von Web 3.0, einem Internet, in dem Systeme mit Sensoren automatisch eine grosse Menge von Daten erfassen, auf Cloud-Servern speichern und durch weit entfernte Kommandozentralen gesteuert werden.
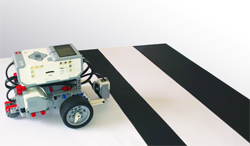
Auch mit dem EV3 kann man einfache IoT-Anwendungen programmieren.