Beispiel 1: Der Roboter kennt den Weg
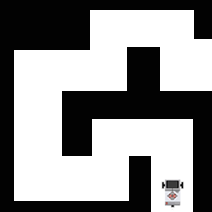
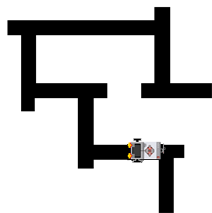
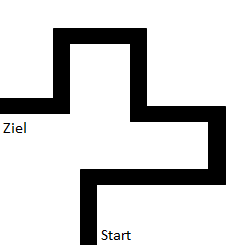
Im einfachsten Fall erhält der Roboter alle Informationen im Programm. Er muss eine einfache Hindernisbahn durchfahren, deren gerade Wegstücke immer gleich lange sind. Zusätzlich erhält er in einer Liste memory Informationen, ob er an den Abzweigungen links bzw. rechts abbiegen soll (0 für links, 1 für rechts).
Er geht also die Liste memory = [0, 1, 1, 0] der Reihe nach durch, biegt bei der ersten Abzweigung nach links, bei der zweiten nach rechts usw. Dazwischen fährt er immer die gleiche Anzahl Millisekunden vorwärts.