 |
TigerJython | xx für Gymnasien |
Verbindung über Bluetooth (Linux) |
Voraussetzung: Im Folgenden wird Aufbau der Bluetooth-Verbindung für Debian auf dem Lernstick, Ubuntu und Debian 7 beschrieben. Fall mehrere Roboter im gleichen Raum vorhanden sind, müssen sie umbenannt werden, denn standardmässig haben alle den Bluetoothname EV3. Eine Anleitung dazu findet man hier. |
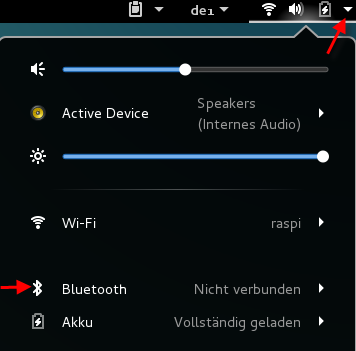
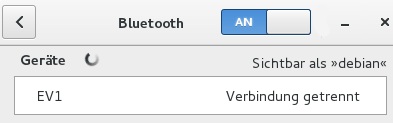
Debian auf dem Lernstick:
Achtung: Die Verbindung muss nach jedem Einschalten des EV3 neu aktiviert werden. Die Paarung muss nur bei der ersten Verwendung des Roboters erfolgen. Verbindung testen: |

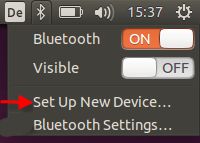
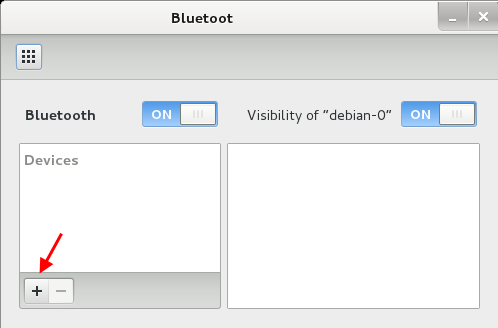
UbuntuPC und EV3 paaren:
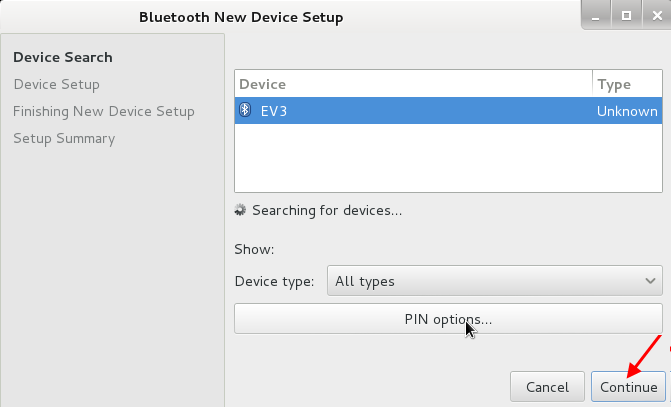
Wählen Sie den EV3 aus und klicken Sie auf Continue.
|
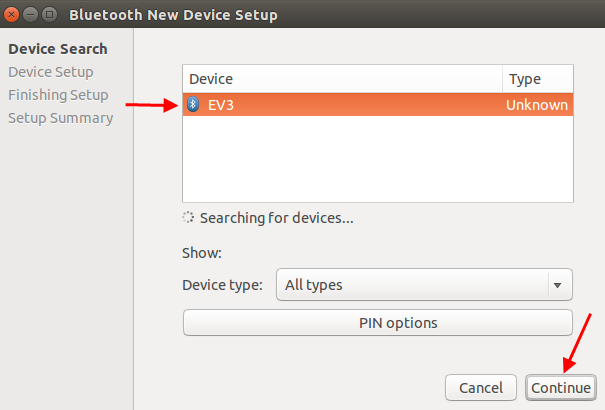
Sie werden aufgefordert eine PIN-Nummereinzugeben. Geben Sie 1234 ein.
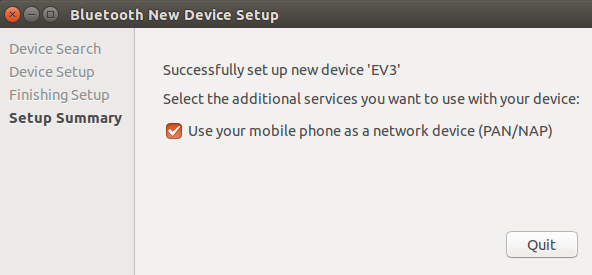
Die erfolgreiche Paarung wird bestätigt. Aktivieren Sie die Checkbox Use your mobile phone as a network device (PAN/NAP).
|
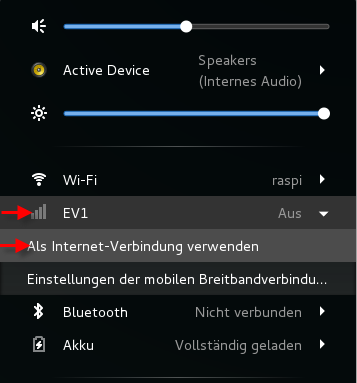
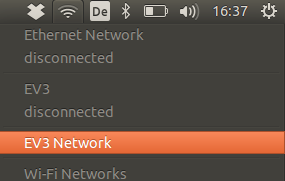
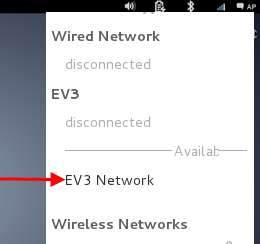
Verbindung herstellen:
Achtung: Die Verbindung muss nach jedem Einschalten des EV3 erstellt werden. Netzwerk-Verbindung mit ping überprüfen: |
Debian 7PC und EV3 paaren:
Wählen Sie den EV3 aus und klicken Sie auf Continue.
|
Sie werden aufgefordert eine PIN-Nummer einzugeben. Die erfolgreiche Paarung wird bestätigt. |
Verbindung herstellen:
|
 |
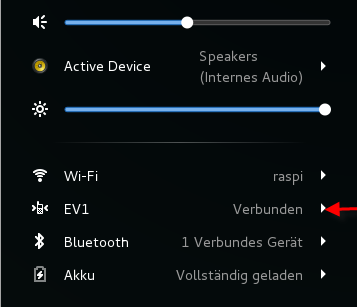
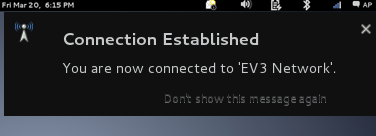
Die Verbindung ist nun hergestellt:
|
 |
Achtung: Die Verbindung muss nach jedem Einschalten des EV3 aktiviert werden. Netzwerk-Verbindung mit ping überprüfen Öffnen Sie das Terminal und geben Sie ein: |
EV3 umbenennenIn einem Klassenverband oder wenn Sie mit mehreren EV3 arbeiten, ist es sinnvoll, den Robotern verschiedene Namen zu geben. Die Umbenennung kann direkt auf dem EV3 unter dem Menüpunkt System - Change name vorgenommen werden. Es erscheint ein Bildschirm mit vielen Zeilen. Dieser dient zur Texteingabe auf dem EV3-Display. Suchen Sie mit den Cursortasten die passenden Zeichen und geben Sie den neuen Bluetooth-Namen (mit Cursor auf Zeichen gehen und Enter drücken. Die eingegebenen Zeichen erscheinen oben auf dem Display. Mit wird ✓ die Eingabe beedet. Nach dem Umbenennen muss der EV3 neu gestartet werden. |
![]()